Feature Extraction of Each Object
Main Sheet Configuration
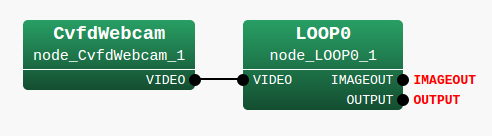
- Required Modules
- CvfdWebcam
- LOOP0 (This appears after you create iterator sheet.)
CvfdWebcam
All description is available at Image I/O.
LOOP0
All description is available at Image I/O.
Iterator Sheet Configuration
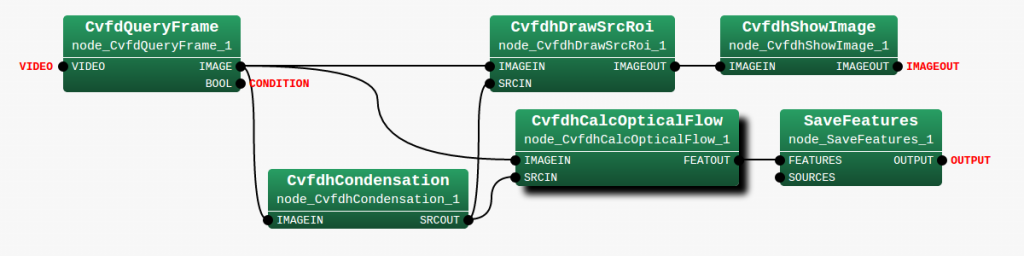
- Required Modules
- CvfdQueryFrame
- CvfdhCondensation
- CvfdhDrawSrcRoi
- CvfdhShowImage
- CvfdhCalcOpticalFlow
- SaveFeatures
CvfdQueryFrame
All description is available at Image I/O.
CvfdhCondensation
All description is available at Image-based Segmentation and Object Tracking.
CvfdhDrawSrcRoi
All description is available at Image-based Segmentation and Object Tracking.
CvfdhShowImage
All description is available at Image I/O.
CvfdhCalcOpticalFlow
- Module Description
This module calculates optical flow vector of each segmented image and outputs the direction and length of each vector as the image feature.
If you want to use other image features, you can replace this module with a module in the following category.
Node list > FDOPENCV_HARK:Feature
- Module Location
Node list > FDOPENCV_HARK:Feature > CvfdhCalcOpticalFlow
- Property settings
| Name | Type | Value | Explanation |
|---|---|---|---|
| OPTICAL_FLOW_TYPE | string | PyrLK | Optical flow type you want to apply |
You can select one of BM/HS/LK/PyrLK for your preference.
SaveFeatures
This is a HARK standard module.
Therefore, all description is available at HARK document.
- Property settings
| Name | Type | Value | Explanation |
|---|---|---|---|
| BASENAME | string | sep_ | Prefix of file name when saving. |
Examining the network file
Save the network file before closing [e.g.) cvOpticalFlowAfterSegmentation.n ] Connect your camera supported by OpenCV [e.g.) USB camera] Go to the terminal and run the HARK network file
./cvOpticalFlowAfterSegmentation.n
You’ll see the video stream in BaseImage window with a segment window.
After the execution, you will see that sep_*.spec is saved to your current directory, which is the raw-formatted feature file.
The asterisk means the tracked object index.
